Die Lektion beginnt mit zwei äquivalenten mathematischen Beschreibungen von Messungen:
Allgemeine Messungen können durch Sammlungen von Matrizen beschrieben werden – eine für jedes Messergebnis –, die die Beschreibung projektiver Messungen verallgemeinern.
Allgemeine Messungen können als Kanäle beschrieben werden, deren Ausgaben stets klassische Zustände sind (dargestellt durch Diagonaldichtematrizen).
Wir beschränken unsere Betrachtung auf Messungen mit endlich vielen möglichen Ergebnissen.
Zwar ist es möglich, Messungen mit unendlich vielen möglichen Ergebnissen zu definieren, doch treten diese im Kontext von Berechnung und Informationsverarbeitung weit seltener auf; zudem erfordern sie zusätzliche Mathematik (nämlich Maßtheorie), um sie ordnungsgemäß zu formalisieren.
Zunächst konzentrieren wir uns auf sogenannte destruktive Messungen, bei denen das Messergebnis allein der klassische Messwert ist – ohne Angabe des Post-Messzustands des gemessenen Systems.
Anschaulich kann man sich vorstellen, dass eine solche Messung das Quantensystem selbst zerstört oder dass das System unmittelbar nach der Messung verworfen wird.
Im weiteren Verlauf der Lektion erweitern wir unsere Betrachtung auf nicht-destruktive Messungen, bei denen es sowohl ein klassisches Messergebnis als auch einen Post-Messzustand des gemessenen Systems gibt.
Sei X ein zu messendes System, und nehme der Einfachheit halber an, dass die klassische Zustandsmenge von X gleich {0,…,n−1} für eine positive ganze Zahl n ist, sodass Dichtematrizen, die Quantenzustände von X beschreiben, n×n-Matrizen sind.
Wir werden nur selten auf die klassischen Zustände von X verweisen müssen, aber es ist praktisch, auf n, die Anzahl der klassischen Zustände von X, Bezug zu nehmen.
Wir nehmen außerdem an, dass die möglichen Ergebnisse der Messung die ganzen Zahlen 0,…,m−1 für eine positive ganze Zahl m sind.
Diese Namen dienen lediglich der Vereinfachung; alles Folgende lässt sich problemlos auf andere endliche Mengen von klassischen Zuständen und Messergebnissen verallgemeinern, indem man sie entsprechend umbenennt.
Eine projektive Messung wird durch eine Sammlung von Projektionsmatrizen beschrieben, die zur Identitätsmatrix summieren.
In Symbolen:
{Π0,…,Πm−1}
beschreibt eine projektive Messung von X, falls jedes Πa eine n×n-Projektionsmatrix ist und die folgende Bedingung erfüllt ist.
Π0+⋯+Πm−1=IX
Wird eine solche Messung an einem System X durchgeführt, das sich im Zustand ∣ψ⟩ befindet, so tritt jedes Ergebnis a mit Wahrscheinlichkeit ∥Πa∣ψ⟩∥2 auf.
Der Post-Messzustand von X ergibt sich durch Normierung des Vektors Πa∣ψ⟩, den wir hier jedoch noch ignorieren.
Wird der Zustand von X statt durch einen Quantenzustandsvektor ∣ψ⟩ durch eine Dichtematrix ρ beschrieben, lässt sich die Wahrscheinlichkeit für Ergebnis a alternativ als Tr(Πaρ) ausdrücken.
Ist ρ=∣ψ⟩⟨ψ∣ ein reiner Zustand, so sind die beiden Ausdrücke gleich:
Hier verwenden wir für die zweite Gleichheit die zyklische Eigenschaft der Spur und für die dritte Gleichheit die Tatsache, dass jedes Πa eine Projektionsmatrix ist und daher Πa2=Πa erfüllt.
Ist ρ im Allgemeinen eine Konvexkombination
ρ=k=0∑N−1pk∣ψk⟩⟨ψk∣
von reinen Zuständen, so stimmt der Ausdruck Tr(Πaρ) mit der mittleren Wahrscheinlichkeit für Ergebnis a überein, da dieser Ausdruck linear in ρ ist.
Eine mathematische Beschreibung allgemeiner Messungen erhält man durch Abschwächung der Definition projektiver Messungen.
Konkret erlauben wir, dass die Matrizen in der die Messung beschreibenden Sammlung beliebige positiv semidefinite Matrizen statt Projektionen sein dürfen.
(Projektionen sind stets positiv semidefinit; sie lassen sich alternativ als positiv semidefinite Matrizen mit Eigenwerten ausschließlich aus {0,1} definieren.)
Eine allgemeine Messung eines Systems X mit Ergebnissen 0,…,m−1 wird also durch eine Sammlung positiv semidefiniter Matrizen {P0,…,Pm−1} festgelegt, deren Zeilen und Spalten den klassischen Zuständen von X entsprechen und die die Bedingung
P0+⋯+Pm−1=IX
erfüllen.
Wird das System X im Zustand ρ gemessen, so tritt jedes Ergebnis
a∈{0,…,m−1} mit Wahrscheinlichkeit Tr(Paρ) auf.
Wie wir es natürlicherweise fordern müssen, bildet der Vektor der Ergebniswahrscheinlichkeiten
(Tr(P0ρ),…,Tr(Pm−1ρ))
einer allgemeinen Messung stets einen Wahrscheinlichkeitsvektor, für beliebige Dichtematrizen ρ.
Die folgenden zwei Beobachtungen zeigen, dass dies tatsächlich der Fall ist.
Jeder Wert Tr(Paρ) ist nichtnegativ, da die Spur des Produkts zweier beliebiger positiv semidefiniter Matrizen stets nichtnegativ ist:
Q,R≥0⇒Tr(QR)≥0.
Dies lässt sich beispielsweise mit Hilfe der Spektralzerlegungen von Q und R sowie der zyklischen Eigenschaft der Spur zeigen: Man drückt die Spur des Produkts QR als Summe nichtnegativer reeller Zahlen aus, die daher nichtnegativ sein muss.
Die Bedingung P0+⋯+Pm−1=IX zusammen mit der Linearität der Spur stellt sicher, dass die Wahrscheinlichkeiten sich zu 1 summieren.
Sei X ein Qubit, und definiere zwei Matrizen wie folgt.
P0=(32313131)P1=(31−31−3132)
Beide Matrizen sind positiv semidefinit: sie sind hermitesch, und ihre Eigenwerte sind in beiden Fällen 1/2±5/6, die beide positiv sind.
Es gilt außerdem P0+P1=I, also beschreibt {P0,P1} eine Messung.
Wird das System X im Zustand ρ mit dieser Messung gemessen, so ist die Wahrscheinlichkeit für Ergebnis 0 gleich Tr(P0ρ) und für Ergebnis 1 gleich Tr(P1ρ).
Ist zum Beispiel ρ=∣+⟩⟨+∣, ergeben sich folgende Wahrscheinlichkeiten für die Ergebnisse 0 und 1:
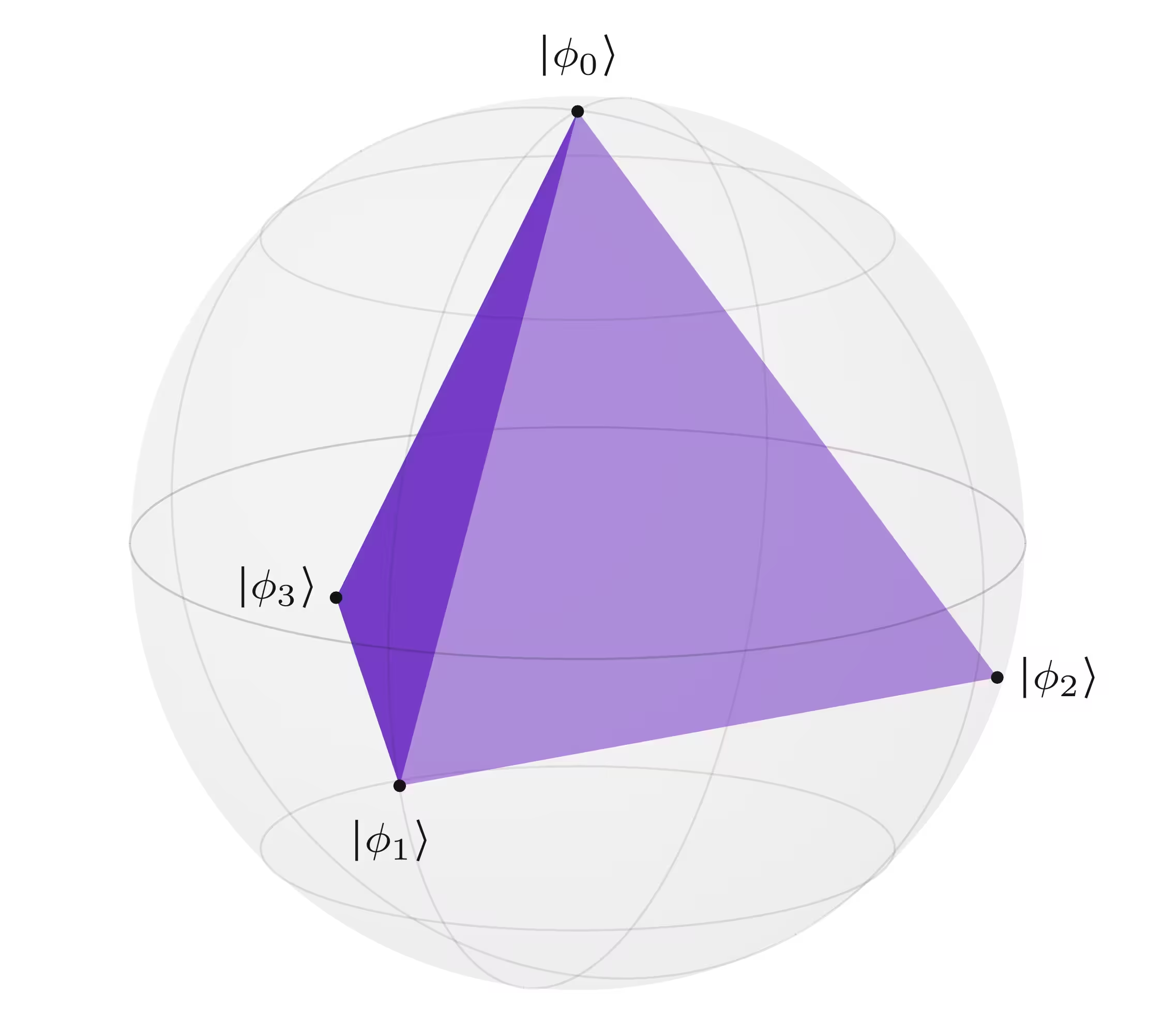
Diese vier Zustände werden manchmal als Tetraederzustände bezeichnet, da sie die Eckpunkte eines regulären Tetraeders bilden, das in die Bloch-Kugel einbeschrieben ist.
Die kartesischen Koordinaten dieser vier Zustände auf der Bloch-Kugel sind
Diese vier Zustände sind auf der Bloch-Kugel gleichmäßig verteilt: Jeder Zustand hat denselben Abstand zu den anderen drei, und die Winkel zwischen je zwei Zuständen sind stets gleich.
Nun definieren wir eine Messung {P0,P1,P2,P3} eines Qubits, indem wir Pa für jedes a=0,…,3 wie folgt setzen.
Pa=2∣ϕa⟩⟨ϕa∣
Dass dies eine gültige Messung ist, lässt sich folgendermaßen überprüfen.
Jedes Pa ist offensichtlich positiv semidefinit, da es ein reiner Zustand dividiert durch zwei ist.
Das heißt, jedes Pa ist eine hermitesche Matrix mit einem Eigenwert 1/2 und allen anderen Eigenwerten gleich null.
Die Summe dieser Matrizen ist die Identitätsmatrix: P0+P1+P2+P3=I.
Dies lässt sich leicht überprüfen, indem man die Darstellungen dieser Matrizen als Linearkombinationen von Pauli-Matrizen verwendet.
Eine zweite Möglichkeit, Messungen mathematisch zu beschreiben, besteht darin, sie als Kanäle aufzufassen.
Klassische Information kann als Spezialfall quantenmechanischer Information betrachtet werden, indem man probabilistische Zustände mit diagonalen Dichtematrizen identifiziert.
Operativ gesehen können wir Messungen daher als Kanäle verstehen, deren Eingaben Matrizen sind, die Zustände des gemessenen Systems beschreiben, und deren Ausgaben diagonale Dichtematrizen sind, die die resultierende Verteilung der Messergebnisse beschreiben.
Wir werden gleich sehen, dass sich jeder Kanal mit dieser Eigenschaft stets in einer einfachen, kanonischen Form schreiben lässt, die direkt mit der Beschreibung von Messungen als Sammlungen positiv semidefiniter Matrizen zusammenhängt.
Umgekehrt gibt es zu jeder beliebigen Messung als Matrizensammlung stets einen gültigen Kanal mit der Diagonalausgabeeigenschaft, der die gegebene Messung gemäß dem vorherigen Absatz beschreibt.
Aus diesen Beobachtungen folgt, dass die beiden Beschreibungen allgemeiner Messungen äquivalent sind.
Bevor wir fortfahren, wollen wir präziser sein: Was ist die Messung, wie fassen wir sie als Kanal auf, und welche Annahmen treffen wir?
Wie zuvor nehmen wir an, dass X das zu messende System ist und dass die möglichen Messergebnisse die ganzen Zahlen 0,…,m−1 für eine positive ganze Zahl m sind.
Sei Y das System, das die Messergebnisse speichert; seine klassische Zustandsmenge ist also {0,…,m−1}, und wir stellen die Messung als Kanal Φ von X nach Y dar.
Unsere Annahme ist, dass Yklassisch ist – das heißt, unabhängig davon, in welchem Zustand X zu Beginn ist, ist der resultierende Zustand von Y stets durch eine diagonale Dichtematrix dargestellt.
Wir können in mathematischen Begriffen ausdrücken, dass die Ausgabe von Φ stets diagonal ist, wie folgt.
Definiere zunächst den vollständig dephasierenden Kanal Δm auf Y.
Δm(σ)=a=0∑m−1⟨a∣σ∣a⟩∣a⟩⟨a∣
Dieser Kanal ist analog zum vollständig dephasierenden Qubit-Kanal Δ aus der vorherigen Lektion.
Als lineare Abbildung setzt er alle Außerdiagonaleinträge einer Eingabematrix auf null und lässt die Diagonale unverändert.
Eine einfache Möglichkeit auszudrücken, dass eine gegebene Dichtematrix σ diagonal ist, lautet:
σ=Δm(σ).
Mit anderen Worten: Das Nullsetzen aller Außerdiagonaleinträge einer Dichtematrix hat genau dann keine Wirkung, wenn diese Einträge von vornherein alle null waren.
Der Kanal Φ erfüllt unsere Annahme – dass Y klassisch ist – genau dann, wenn
Φ(ρ)=Δm(Φ(ρ))
für jede Dichtematrix ρ, die einen Zustand von X beschreibt.
Für dieselben Matrizen P0,…,Pm−1 lässt sich der Kanal Φ also wie folgt ausdrücken.
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
Dieser Ausdruck stimmt mit unserer Beschreibung allgemeiner Messungen durch Matrizen überein: Jedes Messergebnis tritt mit Wahrscheinlichkeit Tr(Paρ) auf.
Nun stellen wir fest, dass die zwei Eigenschaften, die die Matrizensammlung {P0,…,Pm−1} für eine allgemeine Messung erfüllen muss, tatsächlich gegeben sind.
Die erste Eigenschaft ist, dass alle Matrizen positiv semidefinit sind.
Dies ergibt sich daraus, dass für jeden Vektor ∣ψ⟩ mit Einträgen entsprechend den klassischen Zuständen von X gilt:
Die Transponierte jedes Pa tritt bei der dritten Gleichheit auf, weil
⟨c∣Pa∣b⟩=⟨b∣PaT∣c⟩.
Dies erlaubt, die Ausdrücke ∣b⟩⟨b∣ und ∣c⟩⟨c∣ erscheinen zu lassen, die sich beim Summieren über b bzw. c zur Identitätsmatrix vereinfachen.
Da P0,…,Pm−1 nach Voraussetzung positiv semidefinit sind, gilt das auch für P0T,…,Pm−1T.
Insbesondere ergibt das Transponieren einer hermiteschen Matrix wieder eine hermitesche Matrix, und die Eigenwerte einer quadratischen Matrix und ihrer Transponierten stimmen stets überein.
Daraus folgt, dass J(Φ) positiv semidefinit ist.
Das Ausspuren des Ausgabesystems Y (das rechte System) ergibt
Angenommen, mehrere Systeme befinden sich zusammen in einem Quantenzustand, und es wird eine allgemeine Messung an einem der Systeme durchgeführt.
Dies führt zu einem der Messergebnisse, das zufällig mit Wahrscheinlichkeiten gewählt wird, die durch die Messung und den Zustand des Systems vor der Messung bestimmt werden.
Der resultierende Zustand der verbleibenden Systeme hängt dann im Allgemeinen davon ab, welches Messergebnis erzielt wurde.
Untersuchen wir, wie dies für ein Paar von Systemen (X,Z) funktioniert, wenn das System X gemessen wird.
(Wir nennen das rechte System Z, weil wir Y für das System reservieren, das die klassische Ausgabe der Messung darstellt, wenn wir sie als Kanal betrachten.)
Anschließend lässt sich dies leicht auf den Fall verallgemeinern, in dem die Systeme vertauscht sind oder drei oder mehr Systeme vorhanden sind.
Der Zustand von (X,Z) vor der Messung sei durch eine Dichtematrix ρ beschrieben, die wir wie folgt schreiben können.
ρ=b,c=0∑n−1∣b⟩⟨c∣⊗ρb,c
In diesem Ausdruck nehmen wir an, dass die klassischen Zustände von X gleich 0,…,n−1 sind.
Wir nehmen an, dass die Messung durch die Matrizensammlung
{P0,…,Pm−1} beschrieben wird.
Diese Messung kann alternativ als Kanal Φ von X nach Y beschrieben werden, wobei Y ein neues System mit klassischer Zustandsmenge {0,…,m−1} ist.
Die Wirkung dieses Kanals lässt sich konkret wie folgt ausdrücken.
Da wir eine Messung des Systems X betrachten, können die Wahrscheinlichkeiten der verschiedenen Messergebnisse nur vom reduzierten Zustand ρX von X abhängen.
Insbesondere lässt sich die Wahrscheinlichkeit für jedes Ergebnis a∈{0,…,m−1} auf drei äquivalente Weisen ausdrücken.
Tr(PaρX)=Tr(PaTrZ(ρ))=Tr((Pa⊗IZ)ρ)
Der erste Ausdruck stellt die Wahrscheinlichkeit für Ergebnis a auf natürliche Weise dar, basierend auf dem, was wir bereits über Messungen an einem einzelnen System wissen.
Der zweite Ausdruck folgt direkt aus der Definition ρX=TrZ(ρ).
Der dritte Ausdruck erfordert etwas mehr Nachdenken – und du bist eingeladen, dich selbst davon zu überzeugen, dass er wahr ist.
Hier ein Hinweis: Die Äquivalenz von zweitem und drittem Ausdruck hängt nicht davon ab, ob ρ eine Dichtematrix oder jedes Pa positiv semidefinit ist. Versuche zunächst, es für Tensorprodukte der Form ρ=M⊗N zu zeigen, und schließe dann durch Linearität auf den allgemeinen Fall.
Obwohl die Äquivalenz von erstem und drittem Ausdruck nicht unmittelbar offensichtlich ist, ergibt sie sich plausibel.
Ausgehend von einer Messung an X definieren wir effektiv eine Messung von (X,Z), bei der wir Z einfach verwerfen und X messen.
Wie jede Messung lässt sich diese neue Messung durch eine Matrizensammlung beschreiben, und es ist nicht überraschend, dass diese Messung durch die Sammlung
Möchten wir nicht nur die Wahrscheinlichkeiten der verschiedenen Ergebnisse bestimmen, sondern auch den resultierenden Zustand von Z bedingt auf jedes Messergebnis, können wir die Kanalbeschreibung der Messung heranziehen.
Insbesondere betrachten wir den Zustand, den wir erhalten, wenn wir Φ auf X anwenden und Z unverändert lassen.
Dies ist ein Beispiel eines klassisch-quantenmechanischen Zustands,
a=0∑m−1p(a)∣a⟩⟨a∣⊗σa,
wie wir ihn in der Lektion über Dichtematrizen kennengelernt haben.
Für jedes Messergebnis a∈{0,…,m−1} gilt: Mit Wahrscheinlichkeit
p(a)=Tr((Pa⊗IZ)ρ)
befindet sich Y im klassischen Zustand ∣a⟩⟨a∣ und Z im Zustand
σa=Tr((Pa⊗IZ)ρ)TrX((Pa⊗IZ)ρ).(2)
Das ist die Dichtematrix, die wir durch Normierung von
TrX((Pa⊗IZ)ρ)
durch Division durch ihre Spur erhalten.
(Formal ist der Zustand σa nur definiert, wenn die Wahrscheinlichkeit p(a) von null verschieden ist; wenn p(a)=0, ist dieser Zustand irrelevant, da er auf ein diskretes Ereignis mit Wahrscheinlichkeit null verweist.)
Natürlich sind die Ergebniswahrscheinlichkeiten konsistent mit unseren bisherigen Beobachtungen.
Zusammenfassend ergibt sich folgendes, wenn die Messung {P0,…,Pm−1} an X durchgeführt wird, während (X,Z) im Zustand ρ ist:
Jedes Ergebnis a tritt mit Wahrscheinlichkeit p(a)=Tr((Pa⊗IZ)ρ) auf.
Bedingt auf Ergebnis a ist der Zustand von Z durch die Dichtematrix σa aus Gleichung (2) gegeben, die durch Normierung von TrX((Pa⊗IZ)ρ) erhalten wird.
Diese Beschreibung lässt sich auf andere Situationen anpassen, etwa wenn die Reihenfolge der Systeme umgekehrt ist oder wenn es drei oder mehr Systeme gibt.
Konzeptuell ist dies unkompliziert, auch wenn die Formeln umständlich werden können.
Im Allgemeinen gilt: Haben wir r Systeme X1,…,Xr, ist der Zustand des zusammengesetzten Systems (X1,…,Xr) gleich ρ, und wird die Messung {P0,…,Pm−1} an Xk durchgeführt, so gilt Folgendes.
Jedes Ergebnis a tritt mit Wahrscheinlichkeit
p(a)=Tr((IX1⊗⋯⊗IXk−1⊗Pa⊗IXk+1⊗⋯⊗IXr)ρ).
auf.
Bedingt auf Ergebnis a ist der Zustand von (X1,…,Xk−1,Xk+1,…,Xr) durch folgende Dichtematrix gegeben: