Mehrfachprodukt-Formeln (MPF)
Paketversionen
Der Code auf dieser Seite wurde mit den folgenden Anforderungen entwickelt. Wir empfehlen, diese oder neuere Versionen zu verwenden.
Mehrfachprodukt-Formeln (MPF) können verwendet werden, um die Dynamik eines Quantensystems genauer zu simulieren – auf Kosten zusätzlicher Schaltkreisausführungen. Dies ist eine Nachverarbeitungstechnik, die den Fehler von Erwartungswerten für zeitentwickelte Zustände reduziert.
Klassisches Computing wird eingesetzt, um ein lineares Gleichungssystem zu lösen, das Koeffizienten für eine gewichtete Kombination mehrerer Schaltkreisausführungen liefert. Diese gewichtete Kombination kann den Fehler bei der Simulation der Zeitentwicklung reduzieren, sofern die Trotter-Schritte gut gewählt sind. Das MPF-Tool verarbeitet eine Auswahl von Daten – darunter die Anzahl der Trotter-Schritte und die Ordnung der Trotter-Näherung –, um das zugehörige lineare Gleichungssystem vorzubereiten und zu lösen (oder näherungsweise zu lösen). Das Ergebnis kannst du dann zur Nachverarbeitung von Erwartungswertmessungen eines zeitentwickelten Zustands verwenden.
Das MPF-Paket installieren
Es gibt zwei Möglichkeiten, das MPF-Paket zu installieren: über PyPI oder durch Kompilieren aus dem Quellcode. Es wird empfohlen, die Installation in einer virtuellen Umgebung durchzuführen, um Abhängigkeitskonflikte zu vermeiden.
Von PyPI installieren
Der einfachste Weg, das qiskit-addon-mpf-Paket zu installieren, ist über PyPI.
pip install qiskit-addon-mpf
Aus dem Quellcode kompilieren
Nutzer, die im Repository entwickeln oder es manuell installieren möchten, können zunächst das Repository klonen:
git clone git@github.com:Qiskit/qiskit-addon-mpf.git
und das Paket dann über pip installieren. Das Repository enthält außerdem eine Reihe optionaler Abhängigkeiten, die bestimmte Funktionen aktivieren.
Passe die Optionen nach deinen Bedürfnissen an.
pip install tox notebook -e '.[notebook-dependencies,dev]'
Theoretischer Hintergrund
MPFs können den Trotter-Näherungsfehler bei der Simulation der Dynamik von Quantensystemen durch eine gewichtete Kombination mehrerer Schaltkreisausführungen reduzieren. Diese gewichtete Summe ist definiert als:
wobei die Gewichtungskoeffizienten sind, die Dichtematrix ist, die dem reinen Zustand entspricht, der durch Entwicklung des Anfangszustands mittels einer Produktformel entsteht, die den Zeitentwicklungsoperator mit Trotter-Schritten näherungsweise darstellt, und jede in der Summe verwendete Produktformel indiziert.
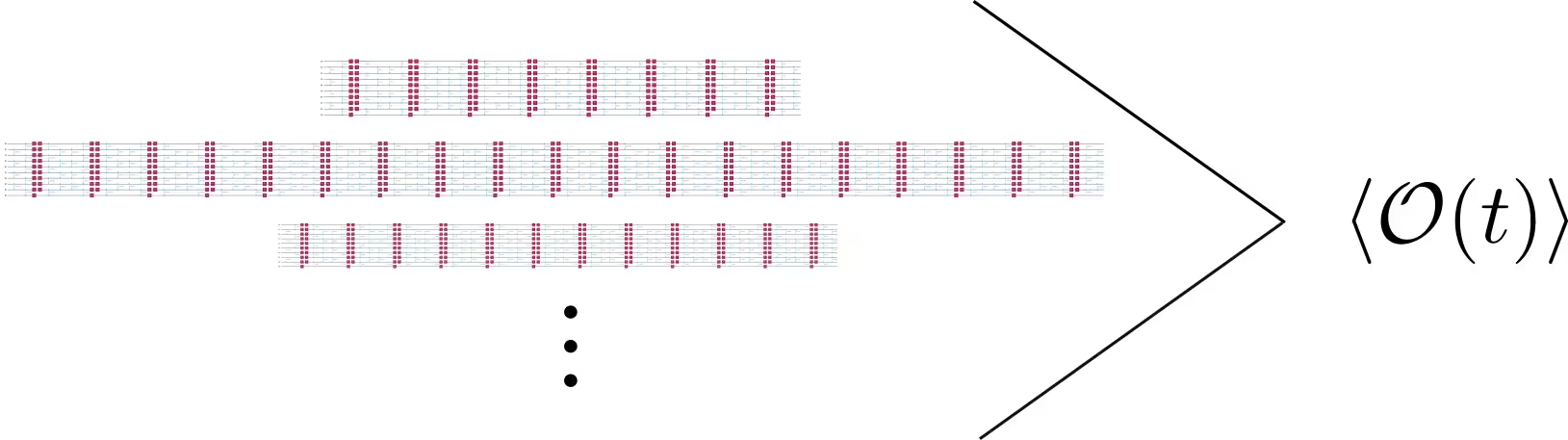
Im Allgemeinen ist das Ziel der Simulation von Quantendynamik jedoch die Messung einer Observable , die eine Funktion der Zeit ist. Bei der Verwendung von MPFs werden mehrere Schaltkreise – jeder mit Trotter-Schritten – ausgeführt, um mehrere Messungen der Zielgröße zu erhalten. Die Messung der Zielgröße wird dann durch folgende Berechnung ermittelt:
Im Wesentlichen lässt sich der Gesamtfehler der Trotter-Näherung reduzieren, indem der Zeitentwicklungsoperator durch mehrere Produktformeln mit unterschiedlicher Anzahl von Trotter-Schritten angenähert wird, anstatt eine einzelne Produktformel zu verwenden. Für jeden Term der gewichteten Summe wird ein Schaltkreis erstellt, der das System gemäß den jeweiligen Trotter-Schritten entwickelt. Jeder Schaltkreis wird dann separat auf einem QPU ausgeführt, um die Ergebnisse in einem Nachverarbeitungsschritt zu rekonstruieren. Der Nutzen dieser Technik lässt sich aus zwei Perspektiven betrachten:
- Bei einer festen Anzahl ausgeführter Trotter-Schritte erhältst du Ergebnisse mit einem insgesamt kleineren Trotter-Fehler.
- Bei einer Anzahl von Trotter-Schritten, die zu tiefen Schaltkreisen führt, kannst du MPF verwenden, um mehrere kürzere Schaltkreise zu finden, die einen ähnlichen Trotter-Näherungsfehler ergeben.
MPF-Koeffizienten bestimmen
Die Kernfunktionalität des qiskit-addon-mpf-Pakets liegt in der Bestimmung der MPF-Koeffizienten (die zeitabhängig sein können). Um jeden zu ermitteln, wird ein lineares Gleichungssystem gelöst, wobei der Vektor der zu bestimmenden Koeffizienten ist, eine Matrix, die von den und der verwendeten Produktformel (also von der Näherungsordnung und der Anzahl der Trotter-Schritte) abhängt, und ein Vektor von Constraints ist. Dieses Gleichungssystem kann entweder exakt oder mit einem Näherungsmodell gelöst werden, das die 1-Norm der Koeffizienten minimiert. Die Wahl der einzelnen ist ein heuristischer Prozess, kann aber durch folgende Constraints eingegrenzt werden:
- Der größte -Wert ist durch die maximale Schaltkreistiefe begrenzt, die zuverlässig ausgeführt werden kann
- Der kleinste sollte erfüllen, da dort der Trotter-Fehler am besten kontrolliert ist
- Keiner der Koeffizienten sollte nahe bei liegen, da dies bedeuten würde, dass sie kaum zur MPF beitragen
- Ebenso sollte der Koeffizient des größten -Werts nicht dominieren, da dies impliziert, dass eine einzelne Produktformel verwendet wird
- Schließlich sollte die Norm der erhaltenen Koeffizienten klein sein, da dies auf eine gut konditionierte MPF hindeutet 1
Nächste Schritte
- Lies die Seite zum Einstieg in MPF.
Referenzen
- A. Carrera Vazquez, D. J. Egger, D. Ochsner, and S. Wörner, "Well-conditioned multi-product formulas for hardware-friendly Hamiltonian simulation", Quantum 7, 1067 (2023).
- S. Zhuk, N. Robertson, and S. Bravyi, "Trotter error bounds and dynamic multi-product formulas for Hamiltonian simulation", Phys. Rev. Research 6, 033309 (2024).
- N. Robertson, et al. "Tensor Network enhanced Dynamic Multiproduct Formulas", arXiv:2407.17405v2 [quant-ph].